2.5D Robotics Drawing
Architectural Robotics Crouse Work with Professor Joshua Bard
Collaboration with Julia Kasper and Ternilla Robinson
Completed Oct 2024
Simultation in Robot Studio
Real Setting Process Documentation
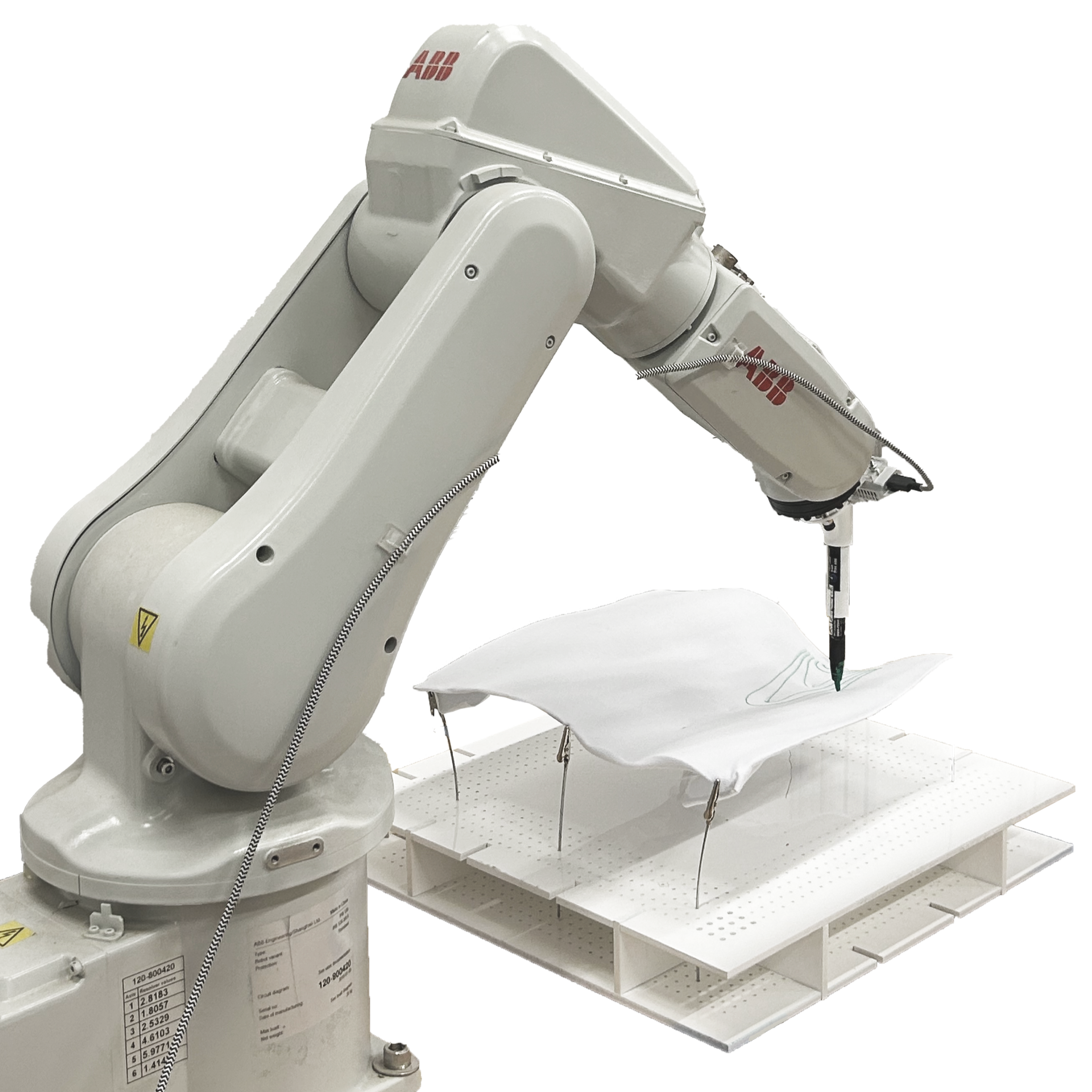
Robots Setting
Goal: 3D Painting on mesh surface
Robot: ABB IRB 120
Software: ABB RobotStudio and Robot Components in Grasshopper
Skill: tool calibration, work object definition, and motion planning, generate RAPID code
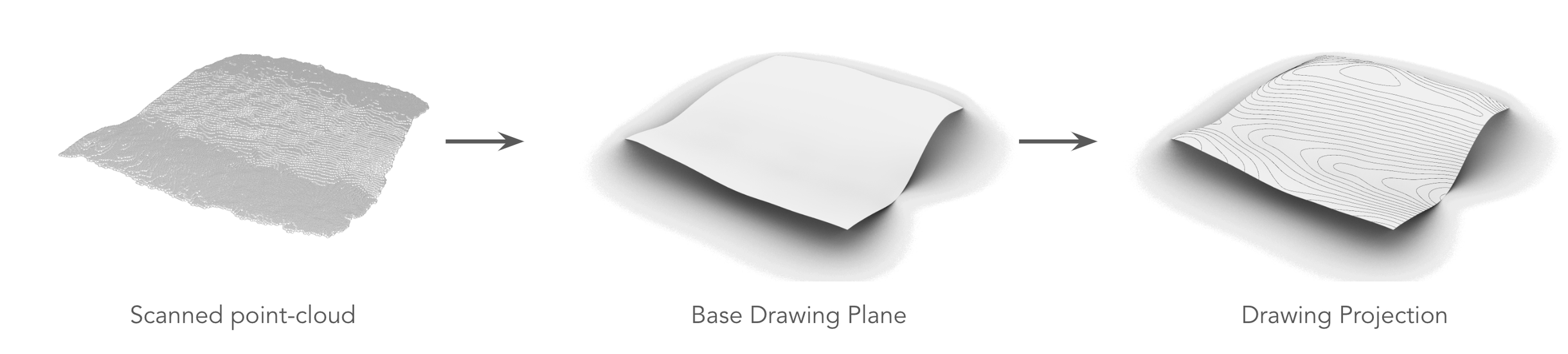
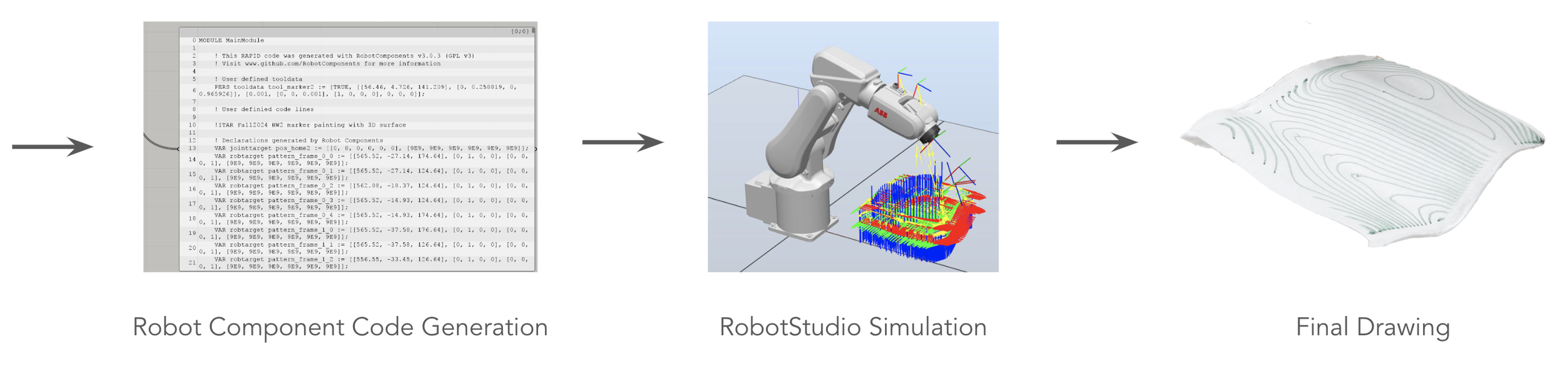

This project focuses on the development of a robotic drawing system capable of autonomous trajectory generation on non-standard, non-planar physical geometries. The workflow utilizes high-fidelity point-cloud scanning to digitize a stochastically deformed mesh, followed by the computational projection of topographical contour data onto the resulting mesh surface. To resolve discrepancies between the digital twin and physical substrate, I implemented work object calibration and motion planning that optimized for variable Z-depths and complex fold geometries. By generating RAPID code directly from the projected 3D paths, I achieved precise end-effector interaction across high-curvature regions, successfully synchronizing digital simulation with real-world execution.