Stereo-Vision
Depth Mapping
Computer Vision Course Work
Individual Work
Completed Nov 2025
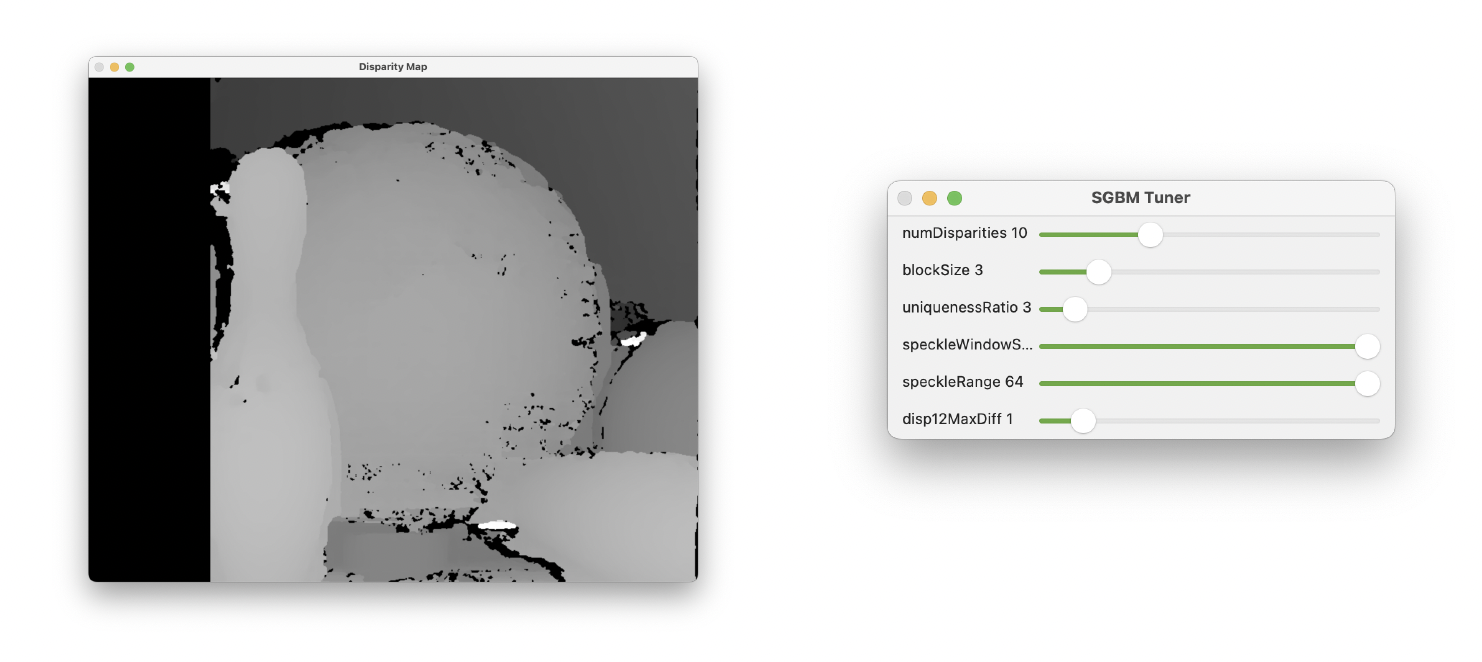
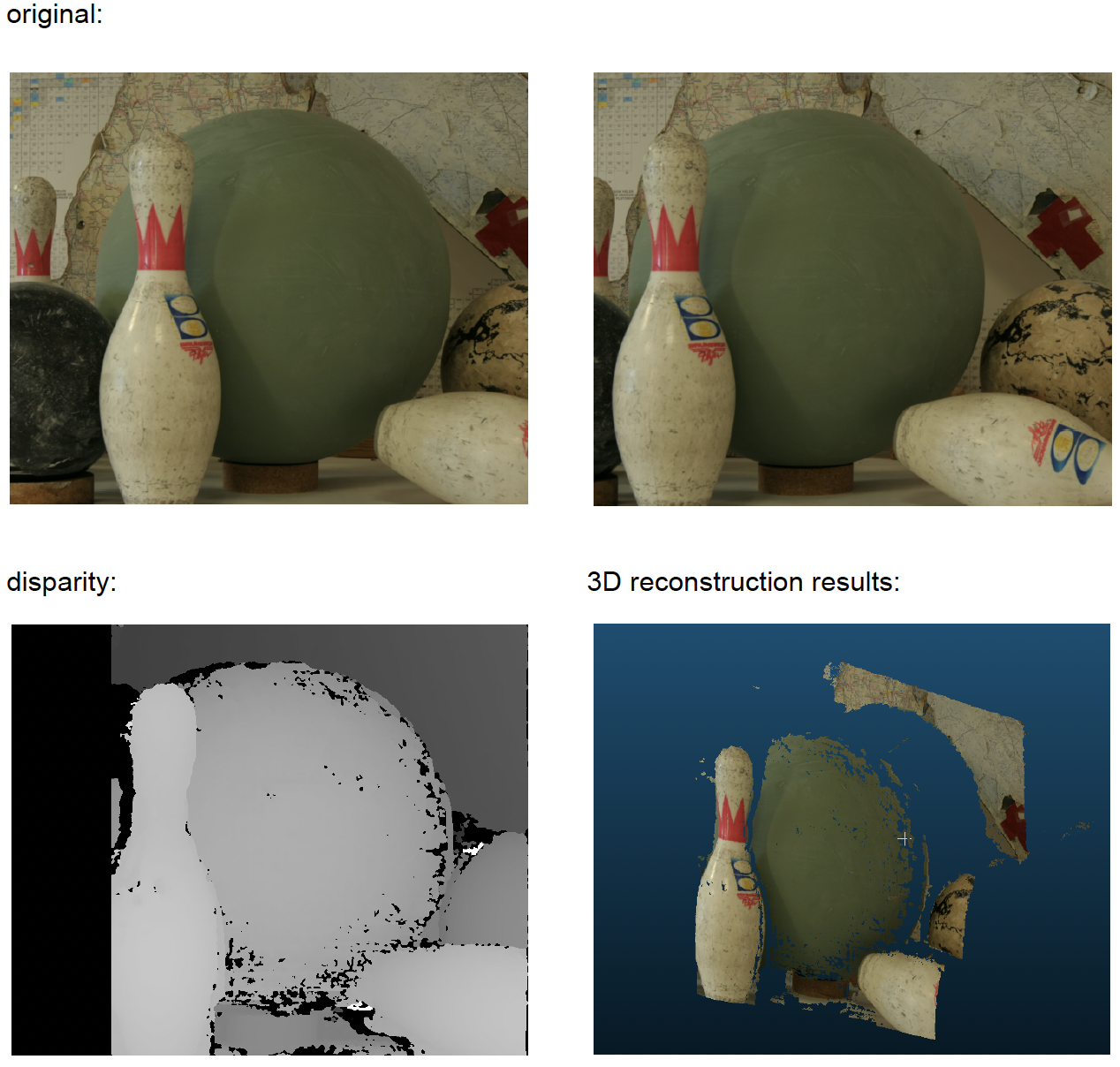
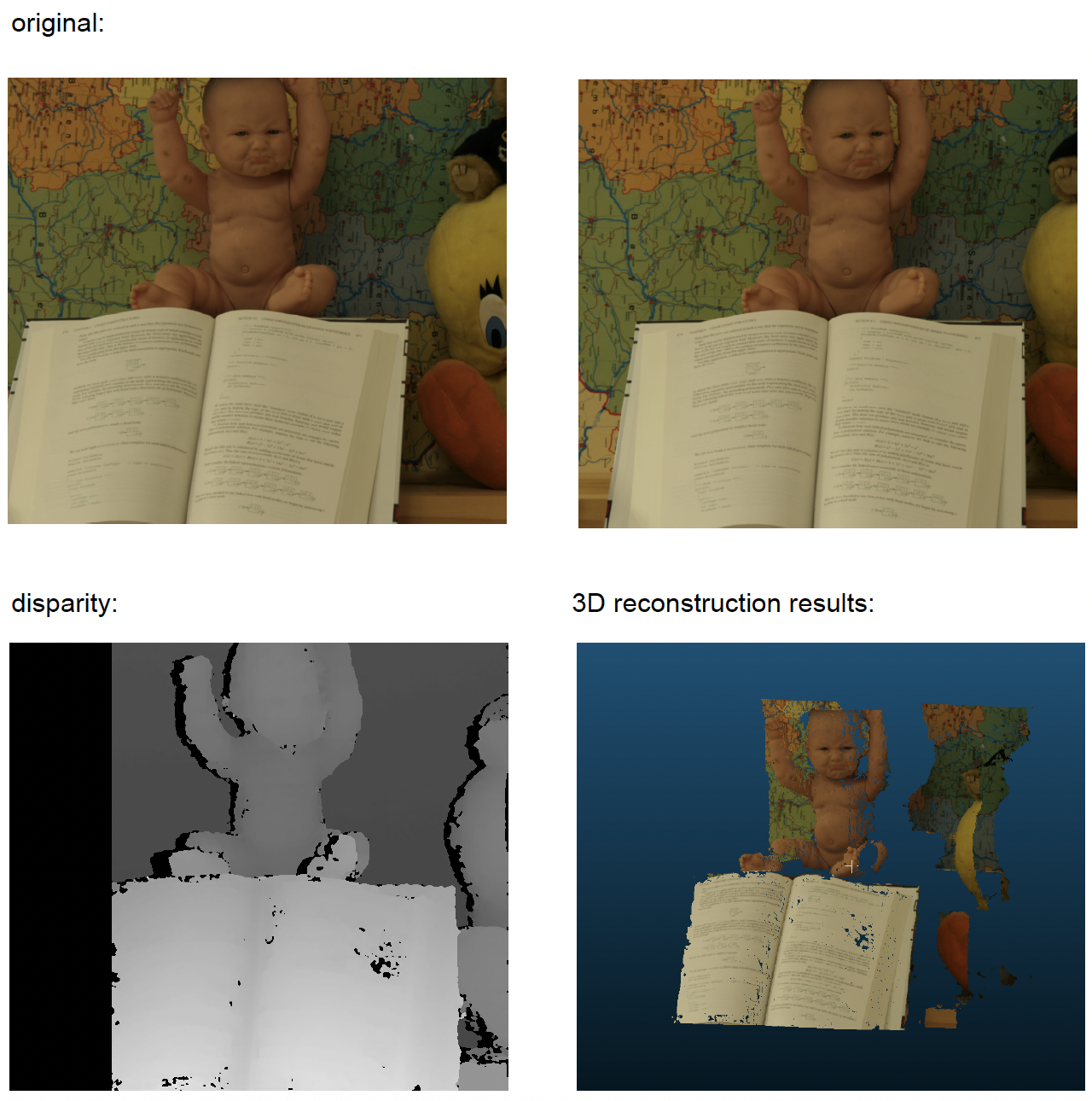
I developed a high-performance Stereo Vision pipeline in Python to reconstruct dense 3D Point Clouds from unconstrained 2D image pairs. To handle the noise and lighting variability of real-world environments, I utilized the Semi-Global Block Matching (SGBM) algorithm, which I calibrated using a custom-built interactive tuning tool (parameters.py) to optimize block size and disparity thresholds. The pipeline converts 2D disparity maps into spatial coordinates using a manual inverse-depth projection, which are then exported as high-resolution .ply files for geometric analysis in CloudCompare. By engineering a robust filtering system to mitigate artifacts in low-texture regions, I successfully transitioned from raw pixel data to accurate 3D surface meshes.